Investigadores de la Universidad Estatal de Carolina del Norte han demostrado un robot blando parecido a una oruga que puede avanzar, retroceder y sumergirse en espacios estrechos. El movimiento del robot-oruga está impulsado por un novedoso patrón de nanocables de plata que utilizan calor para controlar la forma en que se flexiona el robot, lo que permite a los usuarios dirigirlo en cualquier dirección.
«El movimiento de una oruga está controlado por la curvatura local de su cuerpo: su cuerpo se curva de forma diferente cuando se estira hacia delante que cuando se empuja hacia atrás», dice Yong Zhu, autor de un artículo sobre el trabajo y Profesor Distinguido Andrew A. Adams de Ingeniería Mecánica y Aeroespacial en NC State. «Nos hemos inspirado en la biomecánica de la oruga para imitar esa curvatura local, y utilizar calentadores de nanocables para controlar una curvatura y un movimiento similares en la oruga-robot».
«Diseñar robots blandos que puedan moverse en dos direcciones distintas es un reto importante en la robótica blanda», dice Zhu. «Los calentadores de nanohilos incrustados nos permiten controlar el movimiento del robot de dos maneras. Podemos controlar qué secciones del robot se doblan controlando el patrón de calentamiento en el robot blando. Y podemos controlar hasta qué punto se doblan esas secciones controlando la cantidad de calor que se aplica».
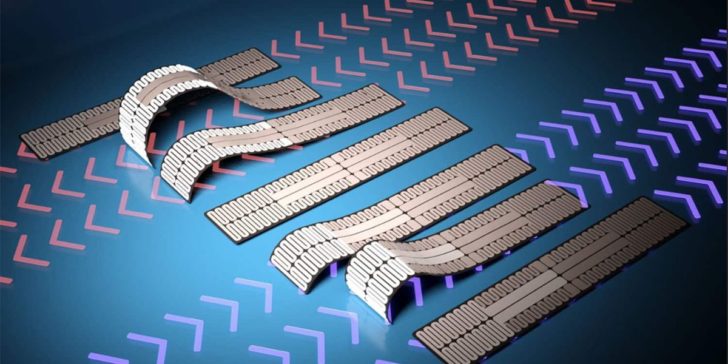
El robot-oruga está formado por dos capas de polímero, que responden de forma diferente cuando se exponen al calor. La capa inferior se contrae cuando se expone al calor. La capa superior se expande cuando se expone al calor. En la capa de polímero que se expande se incrusta un patrón de nanocables de plata. El patrón incluye varios puntos de conexión en los que los investigadores pueden aplicar una corriente eléctrica. Los investigadores pueden controlar qué secciones del patrón de nanocables se calientan aplicando una corriente eléctrica a diferentes puntos de conducción, y pueden controlar la cantidad de calor aplicando más o menos corriente.
«Demostramos que el robot-oruga es capaz de tirar de sí mismo hacia delante y empujarse hacia atrás», afirma Shuang Wu, primer autor del artículo e investigador postdoctoral en NC State. «En general, cuanta más corriente aplicábamos, más rápido se movía en cualquier dirección. Sin embargo, descubrimos que había un ciclo óptimo, que daba tiempo al polímero para enfriarse, lo que permitía al «músculo» relajarse antes de volver a contraerse. Si intentábamos ciclar la oruga-bot demasiado deprisa, el cuerpo no tenía tiempo de «relajarse» antes de contraerse de nuevo, lo que entorpecía su movimiento.»
Los investigadores también demostraron que el movimiento del robot-oruga podía controlarse hasta el punto de que los usuarios podían dirigirlo por debajo de un hueco muy bajo, algo parecido a guiar al robot para que se deslizara por debajo de una puerta. En esencia, los investigadores podían controlar el movimiento hacia delante y hacia atrás, así como la altura a la que el robot se inclinaba hacia arriba en cualquier punto de ese proceso.
«Esta forma de controlar el movimiento de un robot blando es muy eficiente desde el punto de vista energético, y nos interesa explorar formas de hacer que este proceso sea aún más eficiente», afirma Zhu. «Entre los próximos pasos se incluye la integración de este enfoque de la locomoción de robots blandos con sensores u otras tecnologías para su uso en diversas aplicaciones, como dispositivos de búsqueda y rescate».
El artículo, «Caterpillar-Inspired Soft Crawling Robot with Distributed Programmable Thermal Actuation», se publica en la revista de acceso abierto Science Advances. Son coautores del artículo Jie Yin, profesor asociado de ingeniería mecánica y aeroespacial en NC State; Yaoye Hong, estudiante de doctorado en NC State; y Yao Zhao, investigador postdoctoral en NC State.
📬 Newsletter gratuito